
RobAVC
Commande Neuro-mimétique d’un robot de rééducation fonctionnelle post-AVC
Pitch
Le projet avait pour but de faire progresser une collaboration développée depuis plusieurs années avec le Louvain Bionics, un laboratoire de l’Université Catholique de Louvain-la-Neuve (Belgique) spécialisé dans la robotique de rééducation. Nous apportons au Louvain Bionics notre expérience dans l’actionnement par muscles artificiels de bras robot avec pour objectif de montrer la faisabilité d’un bras-robot motorisé par des muscles artificiels pneumatiques biomimétiques destinés à donner au patient, lors d’exercices de rééducation après un AVC, une souplesse de mouvement comparable à celle du physiothérapeute accompagnant leur geste pendant la rééducation.
Objectifs
- Participer à la programmation du bras-robot installé au Louvain Bionics (une version similaire du bras-robot est depuis installée dans une salle d’expérimentation de l’INSA de Toulouse, rattachée au LAAS).
- Définir une commande des muscles artificiels permettant un contrôle hybride en position et raideur articulaires par analogie avec la commande des muscles du squelette. Il s’agissait aussi de préciser en quoi cette commande pouvait s’avérer efficace par comparaison avec d’autres dispositifs de rééducation post-AVC à motorisation électrique.
Type de financement
Mobilité sortante
Chercheur
Bertrand TONDU
Chercheur accueillant
Renaud RONSSE
Partenaires
Université Catholique de Louvain-la-Neuve, Belgique
Mots-clés
Robotique de rééducation
Muscles artificiels pneumatiques
Bras robot
Post AVC
Biomimétisme
Date
01/01/2023 au 10/11/2023
Tutelle
LAAS-CNRS
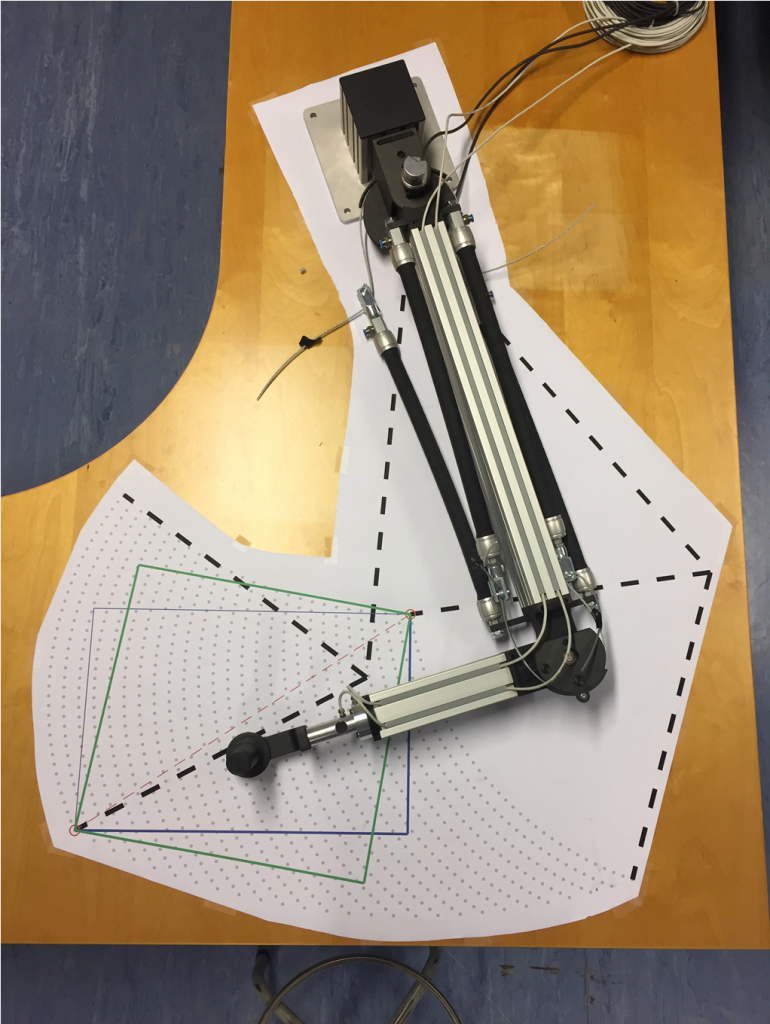
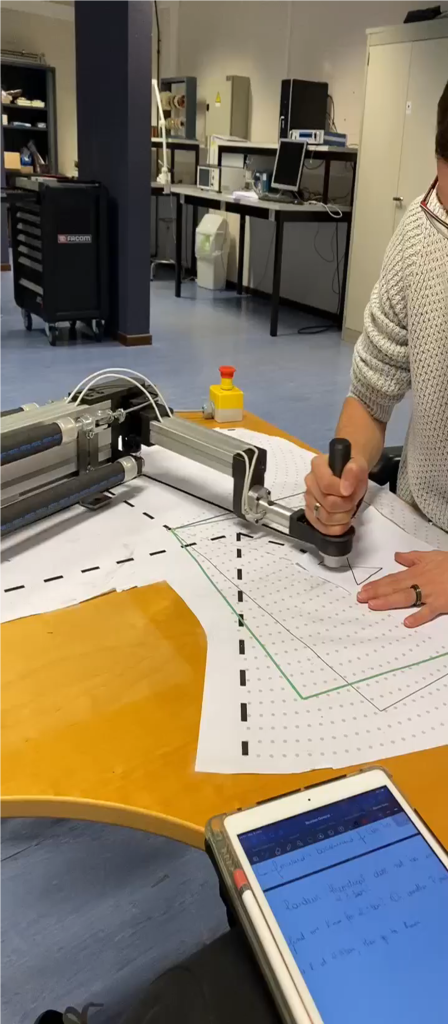
Figure 1. Version actuelle du prototype de bras-robot de rééducation post-AVC (a) et (b) Expérimentation lors d’un exercice de suivi d’une trajectoire prescrite (voir texte).
L’équipe

Renaud RONSSE
ChercheurCatholique de Louvain-la-Neuve, Belgique
Biomécanique
Robotique centrée sur l’Humain