
E-BOT
Energy-Based Adaptable Control for Robots in Unpredictable Environments
Pitch
Ce projet explore de nouvelles méthodes de contrôle pour des robots capables d’interagir en toute sécurité avec des environnements inconnus. En s’appuyant sur l’énergie du système il cherche à améliorer la stabilité des contacts et réduit les chocs, ouvrant la voie à des applications en téléopération.
Objectifs
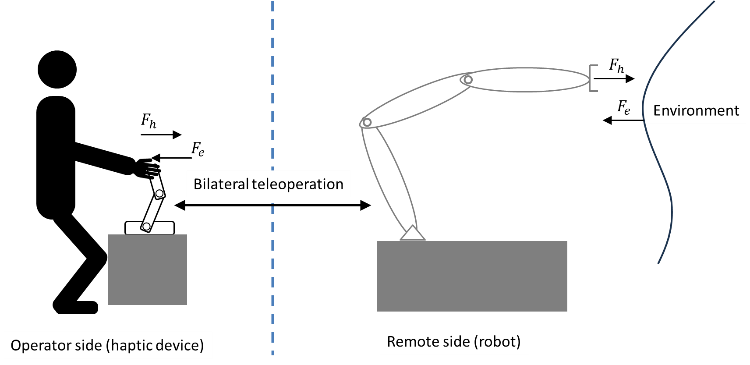
Ce projet de mobilité s’inscrit dans la continuité de la collaboration avec l’Université de Newcastle et vise à approfondir l’étude des méthodes de contrôle des robots en interaction physique avec des environnements inconnus et potentiellement non passifs. L’objectif principal est de développer des lois de commande basées sur l’énergie et le concept de passivité, adaptées aux scénarios complexes rencontrés dans la téléopération bilatérale, où un opérateur humain manipule un dispositif local pendant qu’un robot distant interagit avec un environnement non maîtrisé.
Dans ce contexte, le projet s’est attaché à :
- Améliorer le comportement du robot lors du contact avec l’environnement, en particulier en réduisant les forces d’impact et en assurant la stabilité du contact ;
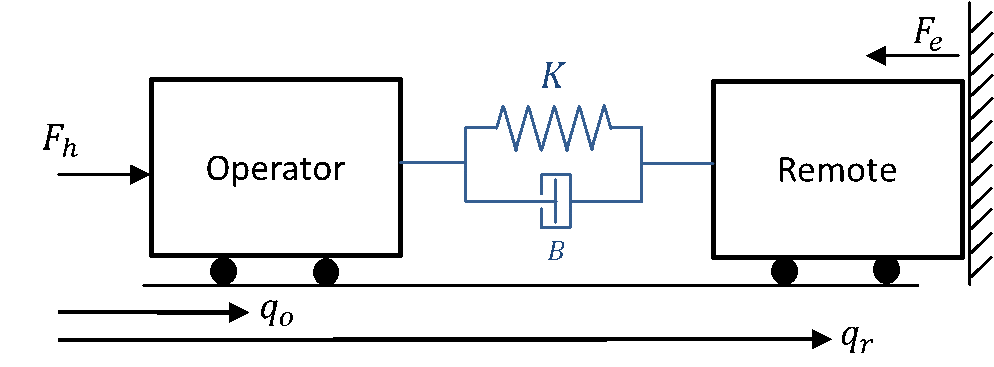
- Modéliser et analyser l’équilibre énergétique du système robot-environnement dans un cadre formel (Port-Hamiltonien) ;
- Explorer de nouvelles pistes autour de la passivité, au-delà des approches classiques (telles que les réservoirs d’énergie), afin de permettre une plus grande flexibilité tout en garantissant la sécurité des systèmes robotiques.
Résultats attendus
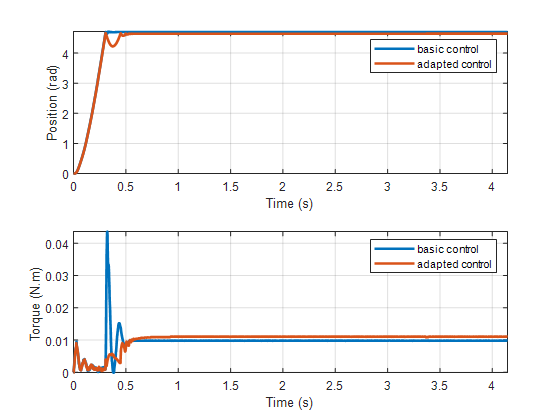
Le travail mené a permis de proposer une nouvelle loi de commande, plus adaptative, combinant une action ressort-amortisseur virtuelle classique avec un contrôle en force désirée et un amortissement complémentaire. Cette commande s’adapte dynamiquement grâce à deux fonctions de transition permettant de moduler le comportement en fonction de la phase de l’interaction (avant ou après contact).
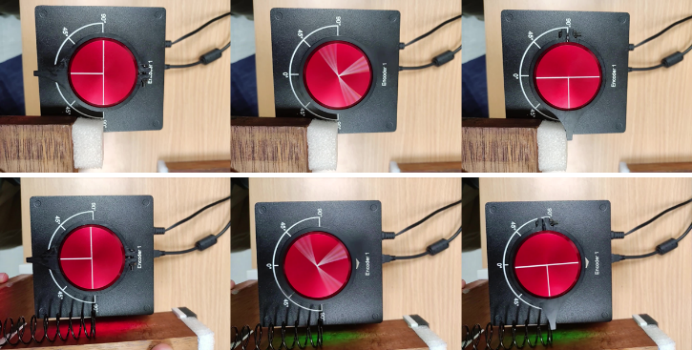
Cette loi de commande a été testée expérimentalement sur un système simplifié composé de deux dispositifs rotatifs (Quanser). Trois scénarios ont été étudiés : application de force impulsive, guidage humain avec force constante, et insertion dans un milieu. Dans tous les cas, les résultats ont montré une réduction significative des forces d’impact, une amélioration de la stabilité après contact, ainsi qu’un temps réduit pour atteindre une force de contact cible.
Les tests ont également permis d’analyser l’évolution de l’énergie du système au cours des interactions, ouvrant une réflexion plus large sur les stratégies permettant de contenir cette énergie sans recourir à des méthodes trop conservatrices. Cela a conduit à des discussions sur la possibilité de relâcher temporairement le concept strict de passivité, tout en maintenant une énergie globalement bornée.
Enfin, ce cas d’étude simple a servi de base pour des développements futurs : un doctorant de l’Université de Newcastle est venu au LAAS en 2025 pour poursuivre ces travaux, qui ont abouti à des avancées significatives. Un article scientifique est actuellement en cours de rédaction pour valoriser ces résultats.
Type de financement
Mobilité sortante
Chercheur
Martin MUJICA
Chercheur accueillant
Alejandro DONAIRE
Partenaires
University of Newcastle
Mots-clés
Robotique interactive,
Téléopération bilatérale
Contrôle basé sur l’énergie
Passivité
Environnements inconnus
Date
25/01/2024 au 27/02/2024
Tutelle
LAAS-CNRS
L’équipe
