Le projet Overworld
Raisonnement géométrique pour la robotique d’interaction
Pitch
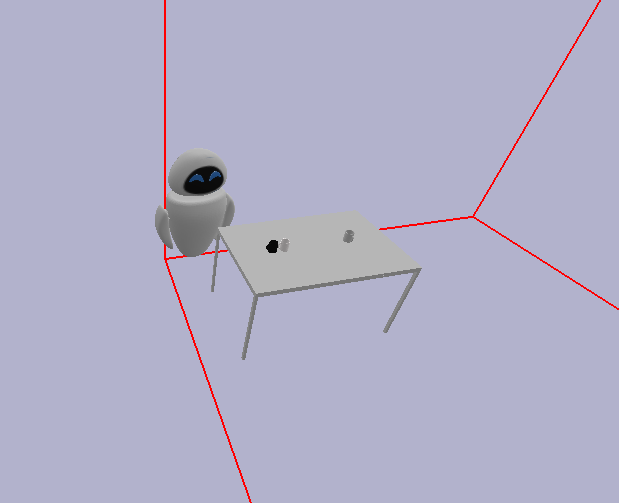
L’objectif de ce stage réalisé au LAAS-CNRS `à Toulouse est d’améliorer les capacités de raisonnement géométrique du logiciel Overworld. Ce logiciel étant dédié à des applications Interaction Humain Robot, le but sera de prendre en compte la perspective du partenaire humain dans le calcul de relations égocentrées ainsi que planifier des positions d’approche du robot en fonction de la position de l’humain, tout ça de manière dynamique.
Objectifs
- Améliorer les capacités de raisonnement géométrique du logiciel Overworld développé par l’équipe RIS au LAAS-CNRS, qui est la brique logicielle dédiée au Situation Assessment dans l’architecture DACOBOT.
Résultats attendus
- Le stage vise essentiellement à améliorer le logiciel Overworld, les différents travaux et tests doivent mener à une avancée significative dans la capacité du logiciel à interagir de manière intuitive avec l’environnement.

Type de financement
Stage de fin d’étude
stagiaire recruté
Emilie LEDOUSSAL
Référents
Guillaume SARTHOU
Aurélie CLODIC
Mots-clés
Logiciel
Interaction Humain robot
Position d’approche
Interactions
Date
11/03/2024 au
29/08/2024
Tutelle
CNRS-Ouest
L’équipe