ROBUST
Développement d’approches robustes et adaptatives pour la commande de robots sous-marins
Pitch
Ce projet développe de nouvelles stratégies de pilotage automatique pour améliorer la précision et la fiabilité des robots sous-marins autonomes. Grâce à des techniques avancées et des tests expérimentaux, il vise à rendre les véhicules sous-marins plus performants face aux incertitudes et perturbations du milieu océanique.
Objectifs
- Concevoir des lois de commande robustes capables d’assurer un suivi de trajectoire précis pour les véhicules sous-marins autonomes.
- Développer des approches non linéaires innovantes basées sur le Sliding Mode Control et des observateurs de perturbations.
- Garantir la stabilité, la robustesse et l’adaptabilité des solutions face aux conditions réelles du milieu marin.
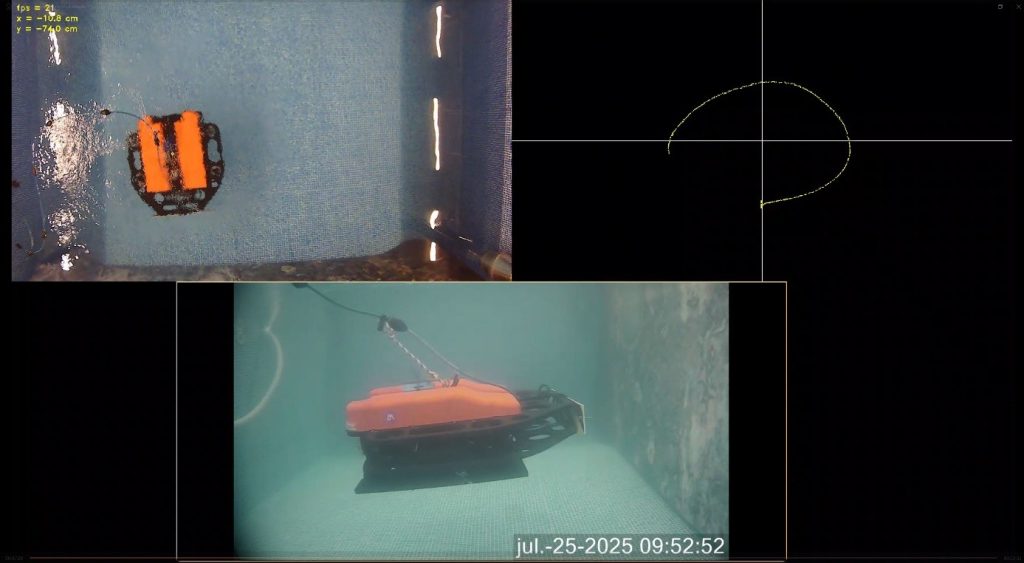
- Valider expérimentalement les algorithmes développés sur le robot HOMER du LIRMM.
Résultats attendus
- Mise au point de plusieurs stratégies de commande robustes innovantes (SMC adaptatif, observateurs de perturbations…).
- Amélioration significative de la stabilité et de la précision des robots sous-marins soumis aux perturbations, variations de masse et incertitudes hydrodynamiques.
- Validation expérimentale en conditions proches du réel grâce à des essais en bassin sur 4 degrés de liberté.
- Production et soumission de publications scientifiques dans des revues scientifiques internationales sélectives (Q1).
Type de financement
Mobilité entrante
Chercheur
Jesus Norberto GUERRERO-TAVARES
Mechatronics
Chercheur accueil
RSM Robotique Sous-Marine
LIRMM
Structure partenaire
Tecnológico Nacional de México
ITS Irapuato and ITS Abasolo
Mots-clés
Robotique sous-marine
Commande robuste
Autonomie
Perturbations et incertitudes Expérimentations
Date
01/06/2025 au 30/08/2025
Tutelle
LIRMM CNRS-UM
Contact