Le projet KNEEUL

Knee Joint Unloading for Post-Surgical Cartilage Rehabilitation
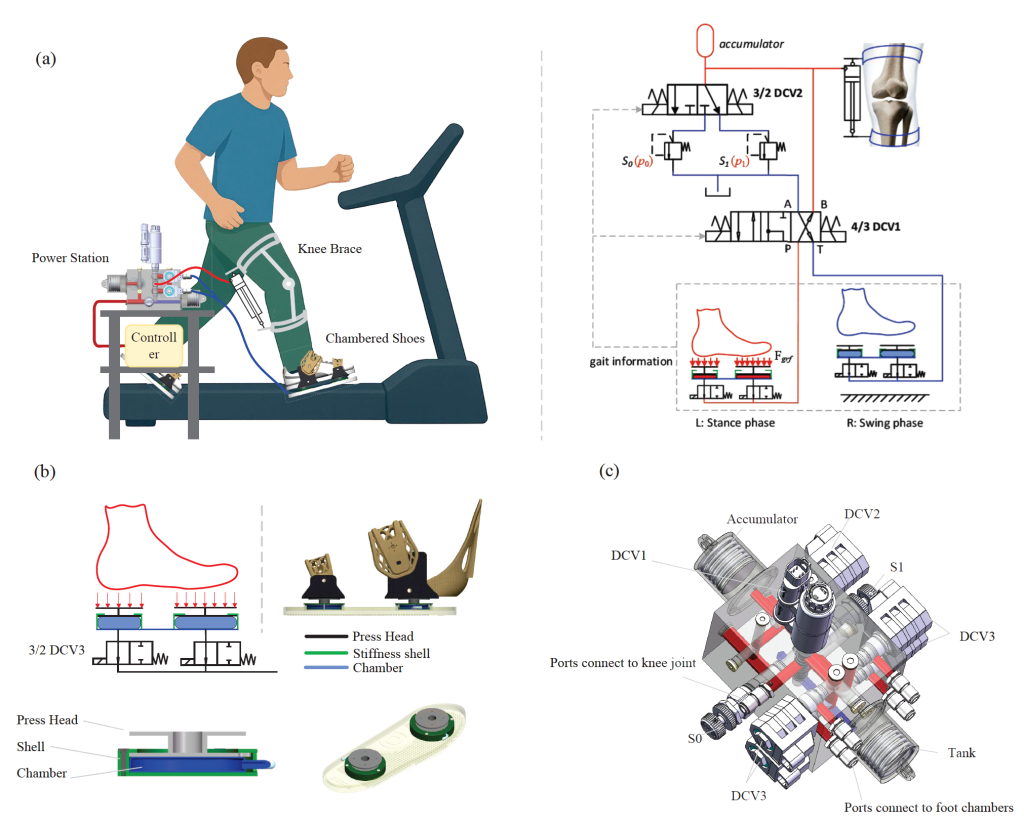
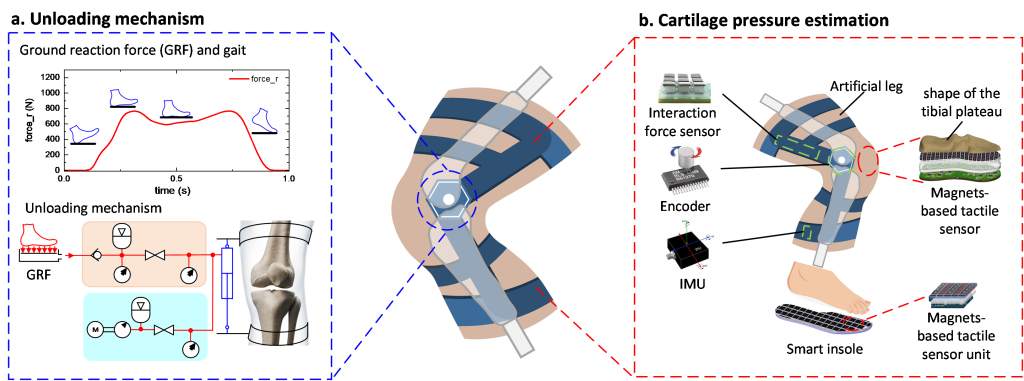
KNEEUL develops a lightweight robotic knee brace driven by ground reaction forces (GRF). The project introduces a mechanically intelligent unloading architecture that preserves natural joint kinematics while reducing internal load through dynamic force redirection.
Objectifs
KNEEUL aims to redefine wearable knee robotics by focusing on mechanical architecture rather than motor-based assistance.
The objectives are:
- To design a GRF-driven unloading mechanism capable of generating controlled femoral–tibial distraction without external powered actuators.
- To optimize the orthosis geometry to preserve natural knee
Type de financement
Post-doctorat
Doctorante recrutée
Maowen Sun
Référents
Abderrahmane Kheddar
Mots-clés
Wearable robotics
mechanical design innovation
ground-reaction-force actuation
joint unloading mechanics
human-robot dynamics
Dates
01/03/2025 au 28/02/2026
Tutelles
CNRS
Résultats attendus
- A lightweight robotic knee orthosis powered by ground reaction forces.
- A validated mechanical unloading principle that reduces stress on the knee joint.
- A functional prototype tested in laboratory walking conditions.
L’équipe