
Le projet BIO-ROB
Modèle BIOmécanique pour la sécurisation et l’amélioration de l’interaction humain-ROBot
Ce projet s’inscrit dans le cadre de la robotique collaborative pour l’amélioration des conditions de travail, la santé et le bien-être à l’aide des moyens de la robotique. Précisément, ce projet vise à améliorer la co-manipulation d’objets entre un humain et un bras robotisé.
Objectifs
- Assurer l’intégrité physique de l’humain lors d’une collaboration physique humain-robot (pHRC).
- Améliorer la qualité de la collaboration physique avec le robot.
- Pour se faire, nous avons identifié deux objectifs plus spécifiques qui sont:
- La prise en compte des capacités humaines en tant que système;
- L’intégration de l’humain comme étant une partie du système en interaction.
- Pour se faire, nous avons identifié deux objectifs plus spécifiques qui sont:
Résultats attendus
Le résultat principal attendu est une méthode améliorée de collaboration humain-robot qui s’inspire des stratégies de collaboration humain-humain.
Les points suivants sont des résultats intermédiaires attendus. Nous voulons faire une comparaison des données biomécaniques de deux sujets co-manipulant un objet sachant que l’un doit s’adapter au comportement de l’autre qui le guide. A partir de ces données, nous voulons développer une méthode de prédiction de la trajectoire de ce même objet. Enfin, nous voulons réaliser des expérimentations réussies entre un humain et un robot s’adaptant en ligne à son partenaire car prenant en compte la prédiction citée précédemment.
Type de financement
Thèse
Doctorante recrutée
Sonia-Laure HADJ SASSI
Référents
Bruno WATIER – Chercheur
Mourad BENOUSSAAD – Chercheur
Mots-clés
Robotique
Biomécanique humaine
Robotique collaborative
Modélisation
Optimisation
Co-manipulation d’objets
Dates
01/10/2022 au 30/09/2025
Tutelle
Université de Toulouse
CNRS
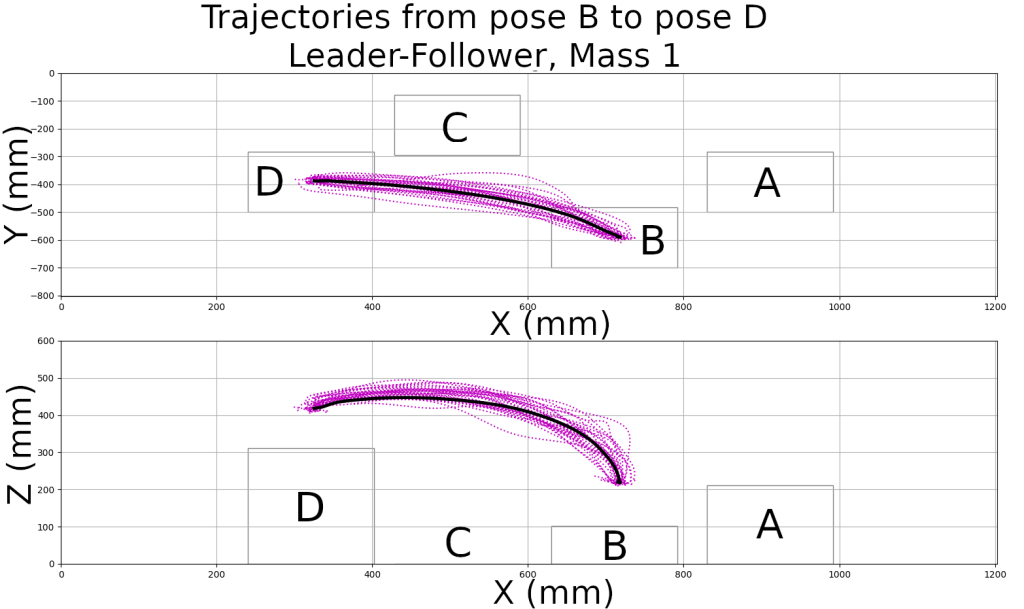
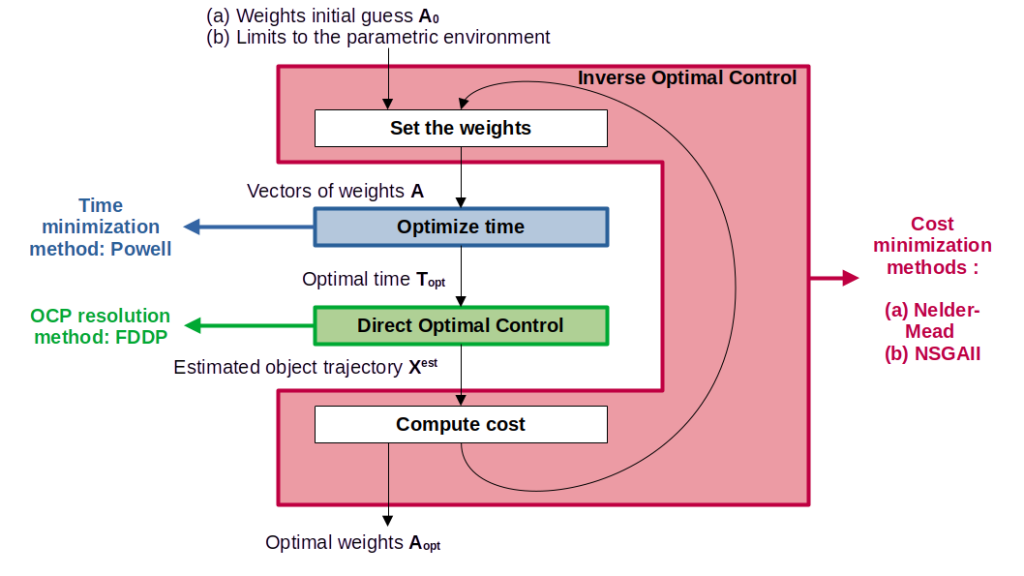
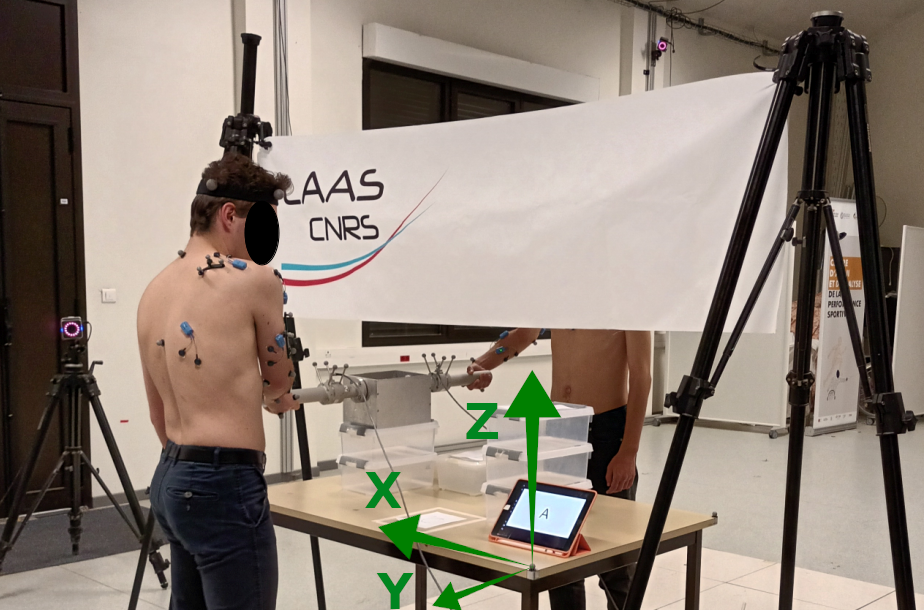
Figure 1. Mise en place de l’expérimentation / Figure 2. Exemple de résultat issu des expérimentations permettant de visualiser : en noir la trajectoire moyenne calculée, en violet les trajectoires de chaque dyade volontaire / Figure 3. Structure du problème de contrôle optimal résolu, avec la comparaison de deux méthodes de résolution de l’IOC ((a) et (b)) menant au choix de l’algorithme génétique NSGAII
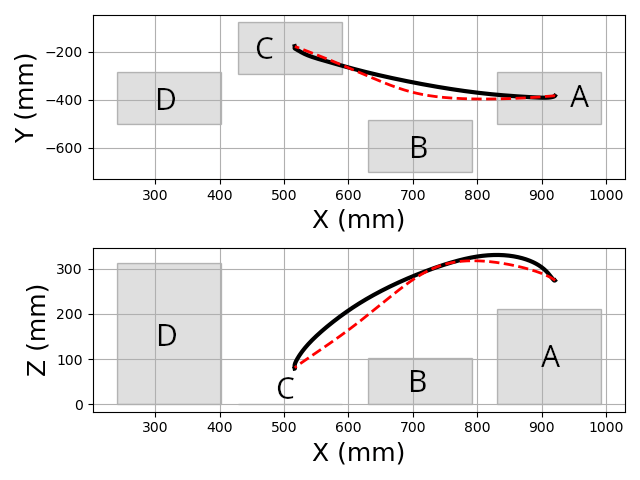
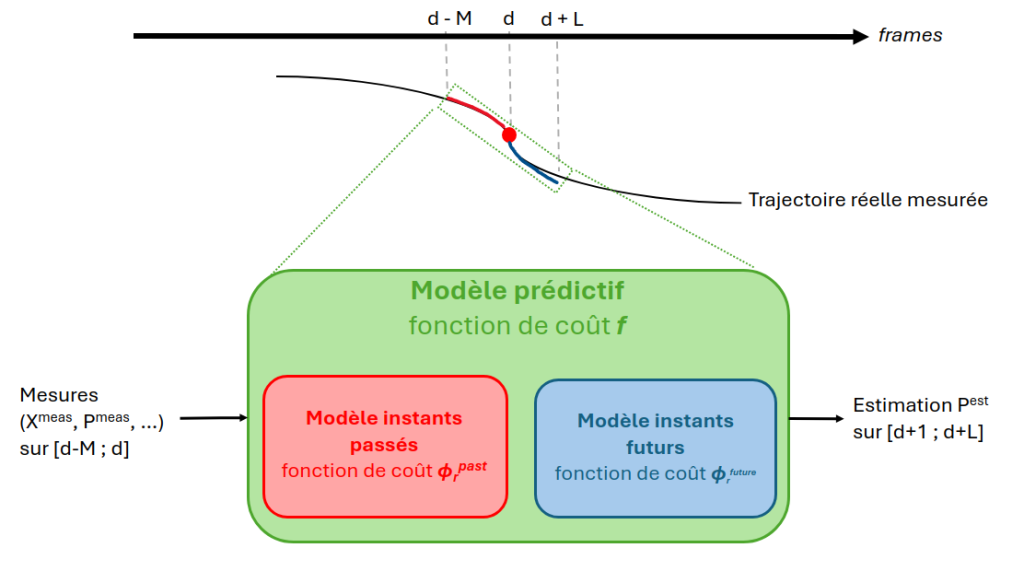
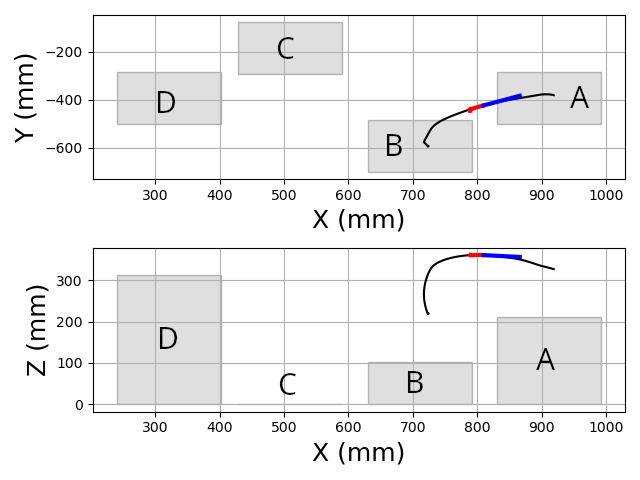
Figure 4. Exemple de résultat de modélisation sur les données d’entraînement avec : en noir la trajectoire moyenne mesurée, en rouge la trajectoire générée / Figure 5. Stratégie de prédiction mise en place avec : en rouge la modélisation relative au passé sur une fenêtre de taille M = 0,15 seconde, en bleu la modélisation relative au futur sur une fenêtre de taille L = 0,3 seconde / Figure 6. Exemple de prédiction obtenue sur les données de la dyade des sujets 20 et 21 avec : en noir la trajectoire mesurée à prédire, en rouge la modélisation du passé, en bleu la prédiction du futur
L’équipe
