KNEETAC project

Super-resolution Tactile Sensing for Smart Knee Braces
KNEETAC aims at providing tactile sensing technology that can measure 3D force distributions on the tibia of the knee and the interaction forces between a knee brace and human skin, which could facilitate the design, assessment, and active control of knee braces in accordance with the wear’s rehabilitation progress.
Target
Implanting bioprinting artificial cartilage directly on the knee has been a promising treatment for knee articulation diseases (e.g., arthritis). However, current trials may fail in keeping the artificial cartilage alive after implantation since the existing knee braces lack skin-comparable tactile sensing abilities and thus cannot progressively relax the supporting forces applied on the knee during the rehabilitation stage of the artificial cartilage.
KNEETAC aims at providing magnets-based tactile sensing technology that can measure force distributions (in both normal and shear directions) on the tibia of the knee (emulated by a dual arm robot) and the interaction forces between a knee brace and human skin, which could facilitate the design, assessment, and active control of knee braces in accordance with the wear’s rehabilitation progress.
KNEETAC will achieve the above goal and advance the state-of-the-art tactile sensing technologies by answering the following two questions:
(1) How can we assess that the newly designed brace does the job of unloading the knee during the rehabilitation period of the artificial cartilage and meets the unloading requirements?
(2) How can we offer a smarter personalized control approach that reduces discomfort inherent to brace skin interaction during the operation mode of the brace? To address the first problem, the challenge is to measure the three-dimensional force distribution on the knee joint with and without using the knee brace. For the second problem, the challenge is to monitor the triaxial interaction forces between the knee brace and skin in real-time
Expected results
- By incorporating intelligent tactile sensors into the assessment, design and actual use of knee braces, KNEETAC aims to benefit a significant population suffering from knee osteoarthritis. It enables adaptive supporting force on the knee during the rehabilitation period of the patient’s artificial cartilage, which aligns with the challenge’s emphasis on human-centered robotics, where robotic systems enhance and support human activities. Furthermore, the tactile super-resolution and force decoupling methods developed for KNEETAC have potential applications in broader robotic perception tasks, such as human-robot interaction and teleoperation. More details of the achieved results can be found in this following section.
Type of financing
PostDoctoral
PostDoctoral
Youcan YAN
Referent
Abderrahmane KHEDDAR
Christian JORGENSSEN
Louis DAGNEAUX
Partners
CHU Montpellier
Keywords
3D tactile sensing
Knee joint force distribution
Brace-skin interaction
Knee rehabilitation
Knee brace assessment
Date
01/10/2023 to
09/10/2024
Tutelle
CNRS Montpellier
L’ équipe
Christian JORGENSSEN
Professors MDCHU Montpellier
Team : Clinical and therapeutic immunology
Rheumatology
Louis DAGNEAUX
Professors MD
CHU Montpellier
Team : Lower limb surgery
Orthopedic surgery
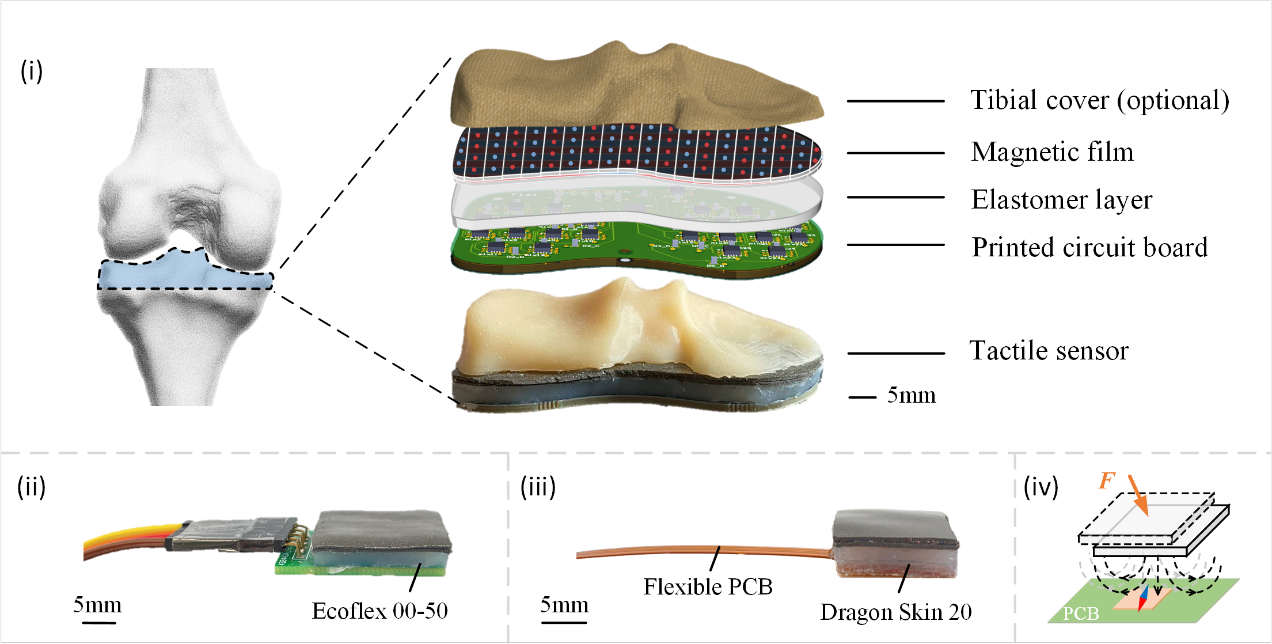
1) Sensor design: To address the challenges posed in the project objectives above, we designed a self-decoupled soft tactile sensor with customizable sensitivity and measurement range. The three-axis self-decoupling property of the sensor is achieved by overlaying two sinusoidally magnetized flexible magnetic films with orthogonal magnetization patterns.
As shown in Fig. 1, the sensor is composed of three primary layers, including a flexible magnetic film (top layer), a printed circuit board (PCB, bottom layer), and an elastomer sheet sandwiched in-between (middle layer). When an external force is applied on the sensor, it results in a corresponding deformation of the top magnetic layer. This deformation, in turn, alters the magnetic field distribution beneath it, and these changes are then detected by the Hall sensors embedded in the PCB, which output three-axis measurements of the magnetic flux densities represented as Bx, By, and Bz for the x, y, and z directions respectively. This change of the magnetic field can be then map to 3D external forces with force decoupling algorithms.
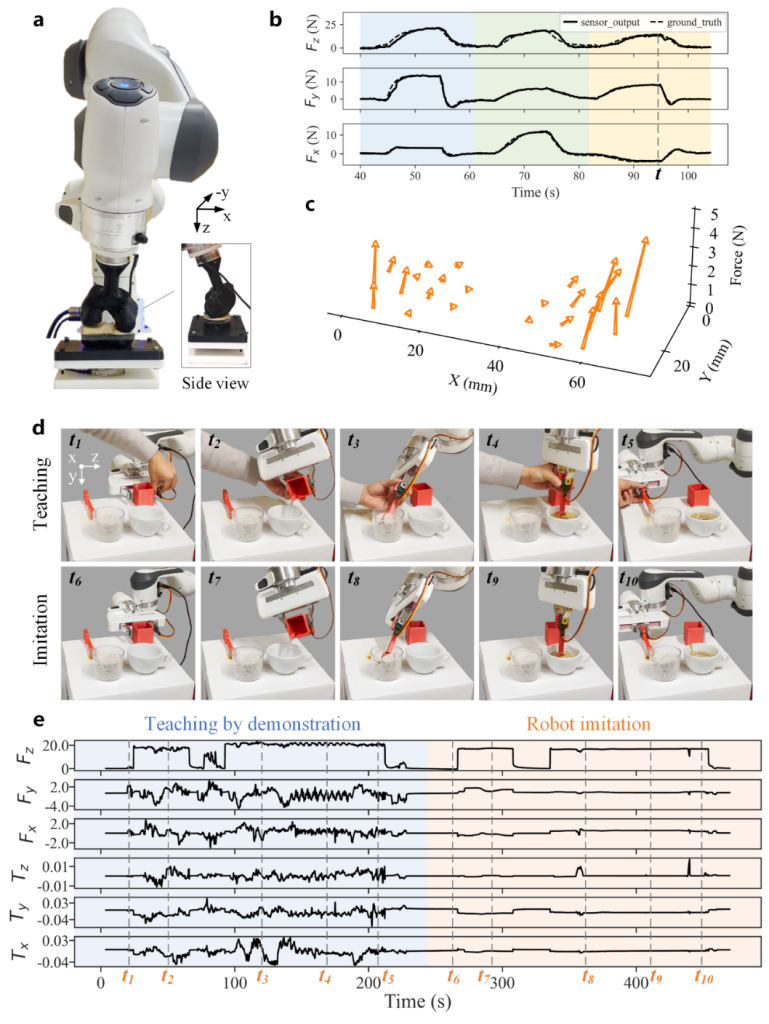
2) Selected results: To validate the efficacy of the proposed force decoupling method in practical settings, we incorporated our sensor into an artificial tibia to measure knee 3D force distribution (see Fig. 2a). Here, a robot-actuated artificial femur is used to emulate the translational and rotational movements typical of a human knee. Figure 2c presents the 3D force distribution map during knee flexion at time t, providing detailed force magnitude and direction at each taxel. We observe that the tactile sensor’s force measurements correspond closely with the ground truth (as shown in Fig. 2b); this validates the accuracy of our force decoupling model.
This information is beneficial to clinicians in the biomechanics field for a deeper understanding of knee conditions and could be instrumental in optimizing treatment strategies for knee-related pathologies.
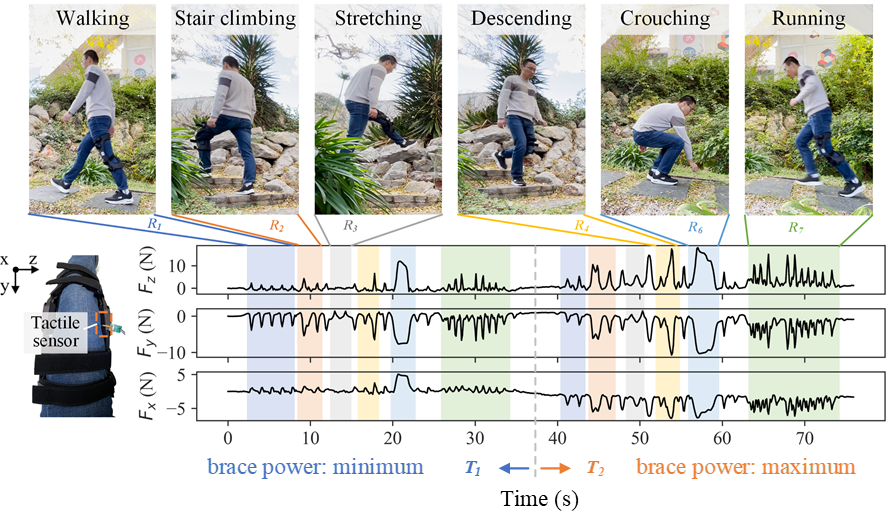
By using a flexible printed circuit board, our sensor can be integrated into a knee brace (or orthosis) to monitor the interaction forces between the brace and the human leg (see Fig. 3). We observe that the sensor responds distinctly to different activities such as walking, stair climbing, crouching, and running. For instance, during activities like stair climbing (or descending) and crouching, where the knee bends more compared to walking, the sensor measures a larger force magnitude (see region R2, R4, and R5 of Fig. 3). As the leg stretches (see Fig. 3 R3), the shear force Fy is seen to increase in the opposite direction as the knee extends. In running (see Fig. 3 R6), both the magnitude and frequency of the sensor’s response change significantly.
This demonstration illustrates that our wearable tactile sensor is capable of monitoring the interaction forces when integrated to a knee brace, suggesting its potential use in broader health monitoring applications such as plantar force detection, force monitoring for prosthetics, and other related areas.