Ce projet vise à améliorer un outil capable d’estimer en temps réel les mouvements du corps humain à partir de simples vidéos. Aujourd’hui, l’analyse précise du mouvement est très utile dans de nombreux domaines : sport, rééducation, ergonomie au travail, prévention des troubles musculo-squelettiques, ou encore collaboration entre humains et robots. Cependant, les systèmes les plus précis reposent souvent sur du matériel coûteux, complexe à installer, et peu adapté à une utilisation en conditions réelles, par exemple dans une usine ou un atelier.
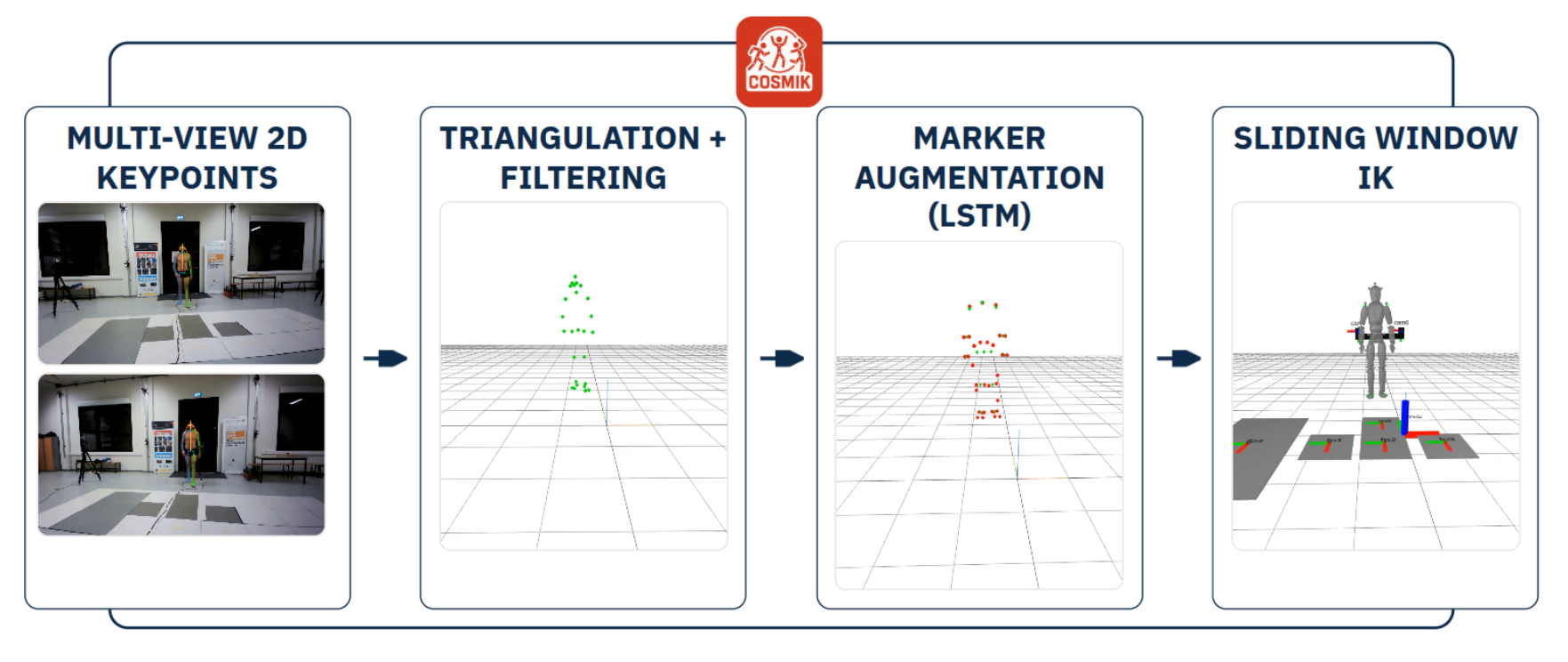
L’objectif du projet est donc de rendre plus robuste, plus rapide et plus facile à utiliser la boîte à outils RT-COSMIK, développée au LAAS-CNRS. Cette solution cherche à reconstruire les mouvements humains en 3D à partir d’une ou plusieurs caméras RGB peu coûteuses, sans marqueurs placés sur le corps. Elle combine des méthodes d’intelligence artificielle, capables de détecter la posture humaine dans les images, avec un modèle biomécanique du corps humain permettant d’obtenir des mouvements cohérents au niveau des articulations.
Le travail consistera d’abord à évaluer les performances actuelles de RT-COSMIK sur des données de mouvements industriels. Il faudra mesurer à la fois la précision des estimations et le temps de calcul, afin de savoir si l’outil peut fonctionner efficacement en temps réel. Le projet prévoit ensuite d’améliorer la modularité du logiciel pour pouvoir tester facilement plusieurs méthodes récentes d’estimation du corps humain, notamment des approches capables de reconstruire une représentation plus complète du corps en 3D.
Un autre objectif important sera de faciliter l’installation et le déploiement de l’outil, par exemple grâce à un meilleur packaging logiciel, une documentation claire et des tests de base. Des pistes plus exploratoires pourront aussi être étudiées, comme l’estimation du mouvement avec une seule caméra ou la détection des contacts des pieds avec le sol.
À terme, ce projet doit contribuer à rendre l’analyse du mouvement humain plus accessible, plus économique et plus utilisable en conditions réelles. Il pourra ouvrir la voie à des applications concrètes en ergonomie, en santé, en sport, en industrie et en robotique collaborative.